1 相干探测信号分析由本振激光器产生激光通过光纤进行传输,其产生的本振光为:Es(t)= Ascos(2nfot+ P) =Asexpj2nfot+ P(5)
本振光经过分束器其中一路在通过 AOM 和放大通过望远镜发射到空气中,此时的信号可以表示为:Em(t)=Amcos[2 fo+ fmt+P]=Amexpj[2 fo+fmt+] (6)放大后的信号经过光开关选择四个方向的望远镜输出打入空气并与空气中气溶胶产生碰撞产生反向的波形:
Ep(t)=Apcos[ 2( fo+fm+fp)t+p]=Apexpj[2fo+fm+fp)t+p] (7)通过光学探测器接收与本振光分束出的另一路,经过合束器合束后混频后的信号为E(t)=Es(t) +Ep(t) (8)
根据光电探测器的平方律特性,光电探测器光敏面上的光电流为:
i(t) = E(t)2 = [E,(t) + Ep(t)]2 = Asexp j(2nfot + P) + Apexp j[2(fo +fm + fo)t + o]]' = [A, exp j(2fot + o)]2 + [A exp j(2fit + p)]2 +2A,Apexpj[2(f - fo)t + Ap] = A + + 2AApexpj[2(f - f)t + Ap](9)
f;=fo+fm+f (20)
公式中前两个分量包括高频的信号和直流信号会被探测器滤除最后得到的光电转换电流信号为:
i(t)=2AApexpj[ 2t( fm+ fp)t+ A p] (22)
数字信号处理得到反射回信号的频率,根据多普勒效应,通过计算的频移和气溶胶的运动速度成正比,散射信号通过和系统内部光纤激光器产生的本振光进行相干调解然后经过 AD采样后进行数字信号处理得到径向风速再经过风场反演算法,即得到目标范围内的风场信息。
2 相干探测激光器激光器主要用来产生探测大气的激光。激光器除了波长么外还有激光输出功 率,线宽,光斑质量等参数。如果激光器光源为脉冲模式,还有重复频率,脉冲宽度,脉冲能量等参数。
2.2 激光器线宽
激光光源所发射激光并非理想单色光,而是有一定波长宽度,在频谱上表 现为频谱展宽,这个展宽决定了激光的相干长度。激光波长和频率存在如下关系:A=号(2-2)
对公式(2-2)进行微分有
AA=AAf(2-2)
或者写为:
Af=号AA(2-3)
光源的相干长度定义为相干时间内激光传播的距离,相干长度可以表示为
L艾 彩民 (2-4)
Tc表示激光光源的相干时间与激光器线宽之间的关系为AfxTc=2 (2-5)
L=忐xc(2-6)
设激光器 波长 2000nm,中心频率为 3x2024Hz,探测距离为2000mAf=3x=3x20Hz=300kHz。对应的波长为(3x20 x 3x 205 =2x 20-nmAA=号Af=_3x20°
在相干探测系统中,如果光源的相千长度越长,本振光和信号光的相千效率就会越高。激光线宽在对外差探测时带来的影响就是产生信号频谱密度分布上的展宽,该展宽频谱使得对频谱峰值提取精度降低。为了尽可能准确提取频谱密度上的峰值频率,要求峰值越窄越好,为此,在激光外差探测时,要尽可能的选取线宽较小的激光器。
2.2 脉冲激光器参数
脉冲测风激光雷达测量距离较远。但是往往存在几十米的探测盲区,盲区可以通过下面式子进行计算
Sblind = Sresolution= CTeul
(2-7)2sblind为探测盲区距离等于最小可分辨距离sresolution’c为光束,Tpulse为脉冲宽度脉冲激光器的重复频率frepeat 决定了该激光雷达系统的最远探测距离,在激光雷达系统中,任意时刻探测器接收到的信号只能是一个脉冲信号在不同距离与大气物质作用的后向散射信号,如果一个时刻探测器接收到两个或者多个信号,多个脉冲在不同位置的后向散射信号将在探测器上反射混叠,探测器系统将不能分辨此时的大气反射信号是来自哪个位置的信9
Smax = 2frepeat(2-8)
重复频率还决定了2s中系统能采集的回波脉冲的个数,由于脉冲雷达系统进行频谱估计时,需要多个回波信号进行多测非相干叠加计算。合适的重复频率能够提高激光雷达系统完成一次视线信号的风速计算。
脉冲激光器的输出能量一般由脉冲功率,平均功率,脉冲能量进行表征EpulsePpulse = Tpulse(2-9)p= Epulsex frepeat (2-20)
Ppulse 为脉冲功率,户平均功率,Epulse为脉冲能量。
3 AOM相干多普勒测风激光雷达系统可以分为零差相干多普勒测风激光雷达和外差相干多普勒测风激光雷达,两者的区别在于发射激光中心频率和本振中心频率之间有没有经过频移调制。零差法没有频移调制,智能区分视向风速产生的多普勒频移大小,无法区分正负,因而无法区分视向风速的方向。外差法适用AOM进行频移调制,将零风速位置的追踪品频率调制为fm’当风速的方向与激光雷达望远镜的视向方向相同时,风速产生的多普勒频移FD为负,反之为正,因此可以区分风速的大小和方向。为了避免风速过大导致的风向混看,频移条质量和多普勒频移量需要满足
fm+fp>0(3-1)
若风速测量范围要求为v=士30m/s,在2550nm波长时,根据多普勒频移公式可得fp=¥=头点=38.7MHz
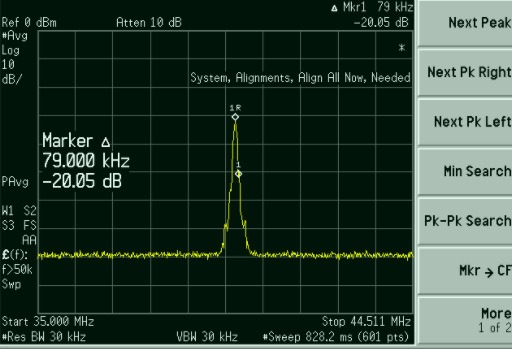
则fm大于38.7MHz即可满足区分风向正负的要求,但是为了减少激光器的相对噪声和2/f噪声对混频信号的影响,目前的相于多普勒测风雷达中最常用的调制为fm为80MHz。